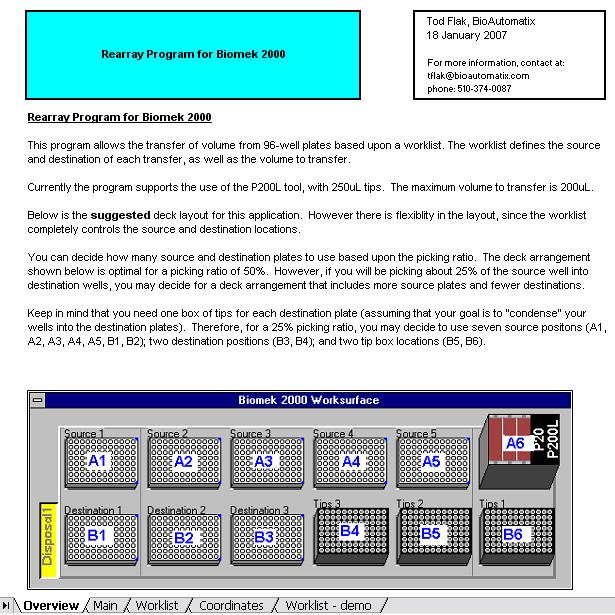
This was a project for a small biotech client who had purchased a used Biomek 2000. The goal was to have the robot pick a designated volume from specific wells on the source plate, and transfer that volume to sequential locations on the destination plate, under the control of a worklist file -- a classic "cherry-picking" application.
We helped them by:
-
Developed an Excel-based interface that allowed them to read a tab-delimited worklist file
-
Wrote low-level TCL code to read information from the Excel workbook and execute the liquid transfers