| The HTS system 6-axis robotic arm
|
While employed by a small biotech company, we designed and programmed two high-throughput screening (HTS) systems. Both systems were built by CyBio AG, in Germany. The first HTS system started as a small workstation, and then was expanded to add more capabilities.
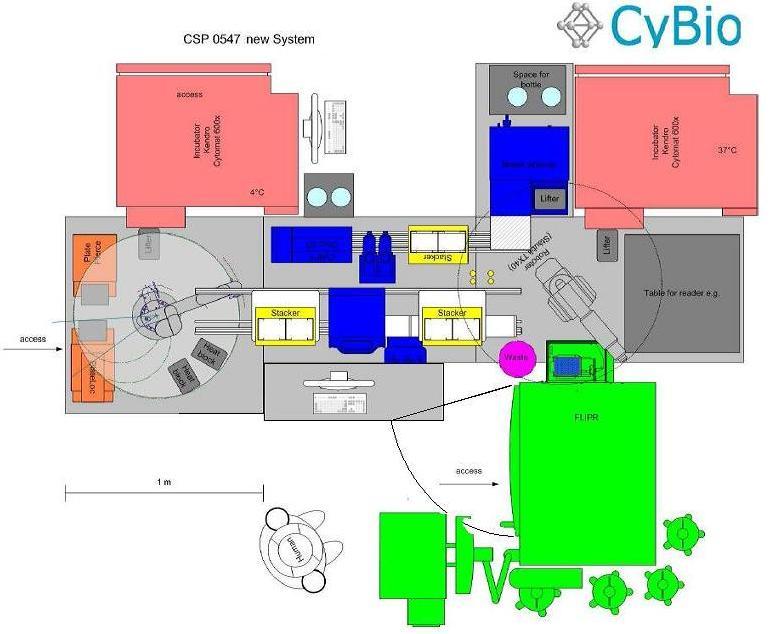
The second HTS system was designed to handle mutliple screening modes, including cell-based and biochemical assays, using FLIPR readout or other plate readers. The system included both cold and warm incubators; 384-well pipetting; reagent dispensing; plate sealing, unsealing and washing; and had a position designated for additional readers to be easily moved in. The system relied upon two robot arms: one Peak KiNEDx SCARA roboit, and one Staubli 6-axis anthropomorphic arm.
The significant contributions that we made on this project:
-
Specified the components, and worked iteratively with CyBio to finalize system design (shown below)
-
Validated the installed system, including a long period of bug testing to eliminate intermittnent problems with plate gripper
-
Extensive programming to execute some complicated experimental protocols
-
Interface to external corporate database for barcode tracking
-
Modification of the vendors plate-tracking database
-
Integration of an additional plate reader instrument, including lower-level instrument control
 |